Use the Aligner Tool 22324ca12582808db1aaefe94a8f62bf
title: "使用对齐器工具" sidebar_label: "使用对齐器工具" sidebar_position: 4 description: "使用 OV80i 对齐器工具的完整指南:模板区域、边缘检测、灵敏度、旋转范围、置信度阈值、红点,以及确保零件对齐稳健性的专家提示。"
使用对齐器工具
对齐器工具是 OV80i 上最强大的功能之一。它使用基于边缘的模板匹配,在零件移动、旋转或在捕获之间发生位移时跟踪零件。当配置正确时,您的感兴趣区域(ROIs)会动态跟随零件,因此每次检查都裁剪出恰好正确的区域,无论零件如何呈现。本指南将带您了解对齐器的每一项功能,解释各设置的作用,并分享专家提示,帮助您节省大量排错时间。
OV80i 相机设置遵循严格的瀑布式流程。对齐器位于第 2 步,在“图像设置”之后、ROI 配置之前。如果在对齐器上游的步骤(镜头、照明、镜头畸变校正、相机位置)有任何修改,您必须重新捕捉模板图像并重新进行对齐。跳过此步骤将导致下游出现微妙且难以诊断的故障。
对齐器实际功能
每次相机捕捉图像时,对齐器都在任何 AI 检查发生之前运行。它会:
- 扫描新图像,寻找与您定义的模板匹配的边缘模式
- 计算偏移量——零件在 X、Y 方向的位移、旋转,以及可选的缩放
- 移动所有您的 ROIs 以匹配检测到的零件位置
- 报告置信度分数,指示对匹配的确定程度
如果置信度分数低于阈值,对齐器将报告失败,您可以选择跳过检测或将捕获标记为拒绝。
结果是:您可以使用更小、更加紧凑的 ROIs,因为它们不需要为零件移动预留巨大的安全裕度。更小的 ROIs 提升信噪比,这意味着 AI 需要的训练数据更少,且结果更为准确。
对齐器仅支持 2D。它在与相机正交的平面上工作。它处理平移(X/Y 位移)、旋转,以及较小的缩放变化(±10%)。它不处理扭曲的零件、弯曲的零件或 3D 透视变换。如果您的零件具有显著的 3D 变化,请跳过对齐器,改用具备定位不变属性的 segmenter(分割器)来实现定位。
配置对齐器之前的先决条件
在配置对齐器之前,请确保您已完成:
- 物理图像设置 — 稳定安装、正确镜头、均匀照明
- 镜头畸变校正 — 在捕获模板之前,在 Image Settings 中进行设置
- 框架良好的零件 — 零件应尽量填满画面以最大化像素分辨率
对齐器页面概览
在 Recipe Editor(配方编辑器) 打开您的配方,并在左侧导航菜单中单击 "Template Image and Alignment"。
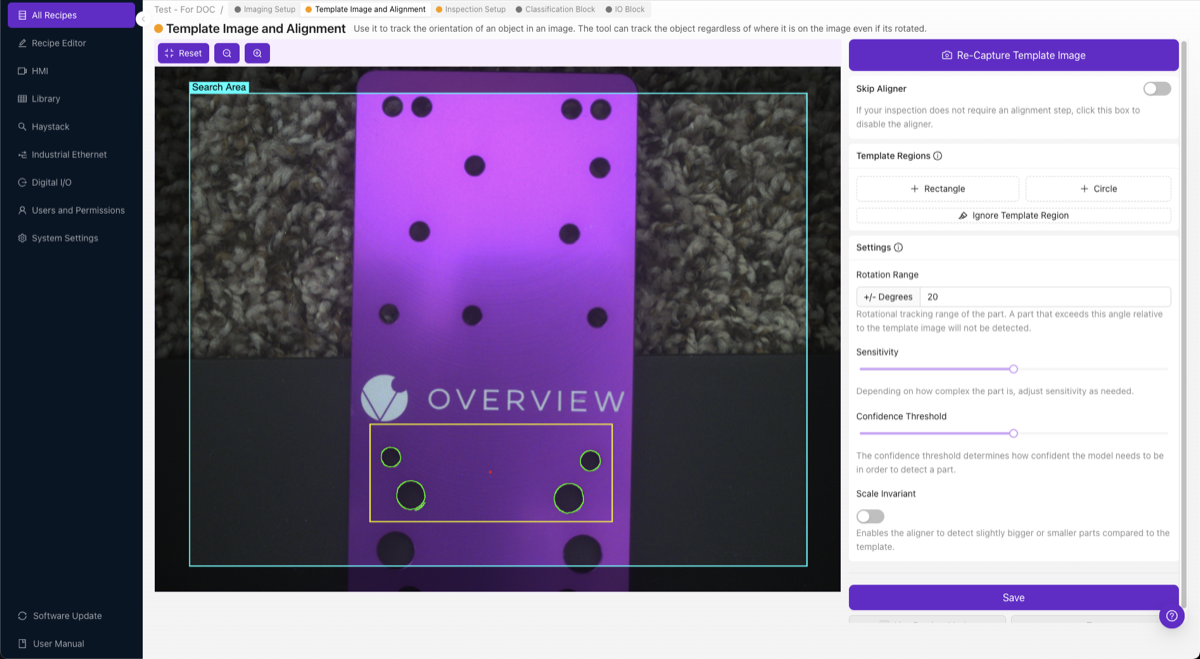
页面分为两个主要区域:
- 左侧:图像预览 — 显示带有模板区域绘制在上方的模板图像。区域内显示边缘高亮(绿色= 检测到良好边缘,红色= 边缘不足)。
- 右侧:设置面板 — 包含所有控件:跳过对齐器切换、模板区域工具、旋转范围、灵敏度、置信度阈值、尺度不变性,以及保存按钮。
在顶部,您将看到用于重新捕捉模板图像的按钮,以及用于 Snap(快照模式)和 Live(实时预览模式)的切换按钮。
第 1 步:捕获模板图像
The template image is the reference photo the Aligner uses to find your part. Place a good example part in the camera's field of view and click Re-Capture Template Image.
Your template part should be:
- 良好照明,边缘清晰锐利,光线均匀且无强烈阴影
- 干净,表面无碎屑、油污或污染
- 代表性的正常、无缺陷部件
- 放置大致在生产中部件通常出现的位置
不要将有缺陷的部件用作模板。对齐器会从此图像匹配边缘模式,因此模板部件上的任何异常都会成为系统期望在每个部件上看到的图案的一部分。
捕获后,预览窗格将从实时摄像头切换到静态模板图像。您将使用此模板图像来定义您的区域。
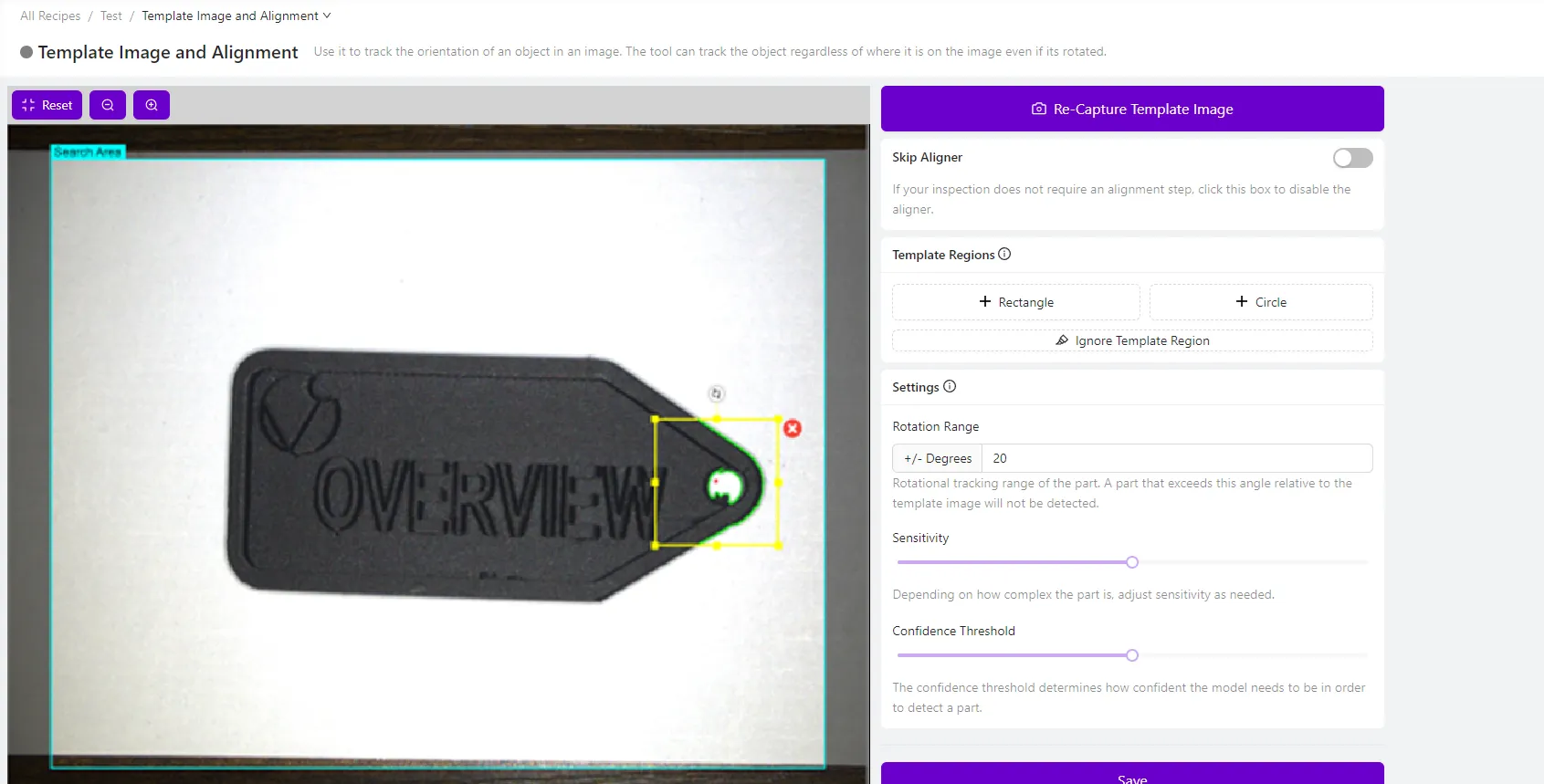
第 2 步:添加模板区域
模板区域告诉对齐器在模板图像上“哪里”查找边缘模式。您是在 distinctive features 周围绘制框(或圆)作为对齐器将用作锚点的特征。
添加区域
在模板区域面板中单击 + 矩形 或 + 圆形 以创建新区域。
放置后,您可以:
- 单击并拖动区域以重新定位
- 拖动角手柄以调整大小
- 单击区域以访问旋转、调整大小或删除选项
良好模板区域的要点
应选择的边缘:
- 简单 — 清晰、界定明确的过渡(角点、孔、加工边缘)
- 独特 — 足以确保图案不会与随机背景特征相匹配
- 一致 — 在每个经过的部件上都存在且相同
- 稳定 — 不在易产生缺陷、污染或磨损的区域
避免将区域放置在:
- 纹理化或粗糙的表面(噪声太大)
- 反光或光亮区域(在不同照明角度下不一致)
- 可能在有缺陷的部件上损坏或缺失的特征
- 可能被碎屑遮挡的极小细节
黄金法则:小而分散放置
在部件上尽可能放置2–3个小模板区域,相距越远越好,例如一个在左上角、另一个在右下角。这是实现稳定对齐的最重要提示。单侧在一边放置一个区域会产生角度抖动(对齐“摆动”0.5°或以上)。在对侧放置两个区域可以将此误差平均化,抖动将减少一个数量级(降至约 ~0.05°)。
您并不需要较大的区域。捕捉一个尖角的小矩形或几个干净的孔,比包含嘈杂背景的大区域要好得多。
第 3 步:理解边缘高亮与红点
一旦放置模板区域,对齐器就会立即分析其中的边缘。您将看到图像上覆盖的彩色高亮:
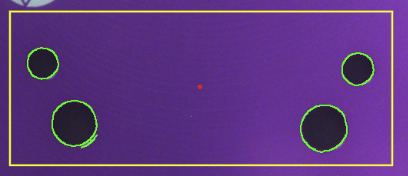
绿色高亮
绿色轮廓 环绕特征意味着对齐器已在该区域检测到强大、可用的边缘。这些是系统将用来找到并追踪您的零件的模式。在一致、稳定特征上看到的绿色越多,您的对齐就越好。
红色点
在模板区域中心(或图像中心附近)看到的小红点是对齐参考点,也称为锚点或对齐中心。这是对齐器用于计算位置和旋转偏移的原点的数学中心。
当对齐器在新图像中找到您的零件时,它会计算零件检测位置相对于该红点的偏移量。所有 ROI 位置随后都将按相同的偏移量进行调整。把红点想象成整个对齐变换的“支点”。
你无需手动调整红点。它是基于你的模板区域自动计算的。将多个模板区域分布在零件上,可以为系统提供更稳定、更准确的参考点。
红色高亮(问题指示)
如果整个模板区域显示红色高亮而非绿色,则表示对齐器在该区域无法找到足够可用的边缘。这是一个问题——意味着该区域不参与对齐。要解决:
- 提高灵敏度 滑块(参见步骤 5)
- 将区域移动 到边缘更锋利、清晰的区域
- 改善照明 以提高零件特征的对比度
- 检查摄像头焦点 —— 模糊的边缘将无法可靠检测
第 4 步:使用 Ignore Template Region 工具清理噪声
即使区域放置得当,也可能捕获到不需要的边缘:反射、纹理、碎屑或背景图案。Ignore Template Region 工具可在这些嘈杂区域上绘制,以将它们从对齐模式中擦除。
- 在 模板区域 面板中点击 Ignore Template Region
- 画笔工具激活——涂抹你想要 移除 的边缘
- 绘制区域将变成一个遮罩,永久将这些边缘从对齐模式中排除
![]()
这点重要吗
Ignore 工具是对齐器配置中最被忽视但也是最重要的步骤之一。模板中的每一个不需要的边缘都是对齐器试图匹配的噪声。如果下一部分没有该噪声(因为它是反射或随机划痕),对齐器的置信度就会下降,或更糟,可能会匹配到错误的位置。
使用 高灵敏度 + 强力清理 策略:将灵敏度滑块调高以检测更多边缘,然后无情地使用 Ignore 工具移除所有不是干净、可重复的零件特征的边缘。这让你获得两全其美的效果——你可以捕捉到微妙但重要的边缘,同时滤除所有噪声。
常见需要忽略的内容:
- 发光点或眩光反射
- 零件周围可见的背景纹理
- 零件本身的表面纹理(拉丝金属、模制图案)
- 来自碎屑、油污或污染的边缘
- 来自标签、贴纸,或在各零件之间差异的标记的边缘
第 5 步:调整灵敏度
Sensitivity(灵敏度) 滑块用于控制边缘检测算法的激进程度。数值越高可检测到的边缘越多(包括细微边缘);数值越低则仅捕获最强、最明显的边缘。

如何找到合适的设置:
- 以默认灵敏度开始
- 如果模板区域显示 红色高亮(边缘不足),请提高灵敏度
- 如果纹理上的绿色噪声和无关特征过多,请降低灵敏度
- 理想设置是在你关心的特征上仍能获得清晰绿色高亮的最低灵敏度
更高的灵敏度并不总是更好。更多边缘意味着噪声的潜在来源增多。最佳做法是:提高灵敏度以捕捉你需要的边缘,然后使用 Ignore 工具去除不需要的部分。这会给你一个干净、可靠的图样。
第 6 步:设置旋转范围
Rotation Range(旋转范围) 定义对齐器在搜索部件时可容忍的旋转变化量。
- ±180 度 — 能在任意旋转角度下找到部件(最大灵活性)。适用于方向不可预测的部件在传送带或机器人抓放系统中。
- ±5–20 度 — 适用于大致定位但可能有小幅旋转变化的部件。常见于带有一定间隙的夹持装置设置。
- ±0 度 — 仅匹配与模板角度完全相同的部件。处理速度最快。
将旋转范围作为质量门控。 如果将范围设为 ±10°,而部件到达时旋转了 15°,对齐器将无法找到它,你可以将该失败用作 拒收信号。这是一种强有力的方式,在 AI 运行之前就能捕捉到呈现错误的部件。
一个常见的错误是在部件实际可以到达任意角度时仍将默认旋转范围设为 ±20°。如果你的部件可以自由旋转(例如在振动喂料盆或没有导轨的传送带上),请将其设为 ±180°。否则,对任何旋转超过 ±20° 的部件,对齐器将无法识别,你将花费数小时排查看起来像随机对齐错误的问题。
处理速度的权衡: 较宽的旋转范围意味着对齐器需要搜索更多的方向,处理时间也会更长。对于高速检测,请使用覆盖实际部件变化的最窄范围。
第 7 步:设置置信阈值
Confidence Threshold(置信阈值) 是对齐器在接受检测为有效之前所要求的最低匹配质量。

- **范围:**0.0 到 1.0(数值越低,匹配越严格;1.0 表示完全匹配)
- **推荐:**大多数应用中为 0.6 – 0.9
置信度如何工作:
对齐器会在模板中的边缘模式与新图像中发现的边缘之间计算相关分数。该分数综合考虑模式相似性、空间精度和边缘质量。若分数超过阈值,匹配被接受;否则将被标记为失败。
调优指南:
| 症状 | 对策 |
|---|---|
| 对齐器错误地将模板匹配到错误的对象或背景 | 提高 阈值(尝试 0.85–0.95) |
| 有效部件未被检测到 | 降低 阈值(尝试 0.60–0.70) |
| 对齐在大多数部件上工作正常,但在少数部件上失败 | 检查失败部件的特征是否被遮挡,然后进行调整 |
第 8 步:在需要时启用 Scale Invariant
The Scale Invariant toggle allows the Aligner to detect parts that appear slightly larger or smaller than the template, handling ±10% size variation. This compensates for parts being slightly closer to or farther from the camera.
Enable Scale Invariant when:
- 部件在可能上升或下降的传送带上
- 部件由机器人呈现,无法保证精确的 Z 高度
- 夹具在垂直轴上存在游隙
- 部件厚度变化,影响图像中看起来的尺寸
Leave it disabled when:
- 部件与相机的距离始终保持一致
- 你希望获得最高对齐速度(尺度搜索会增加处理时间)
- 尺寸变化实际会指示一个问题(错误的部件)
第 9 步:在 Live Preview 中保存并测试
一旦你配置好模板区域和设置:
- 在设置面板底部点击 Save。这将训练并部署对齐器模型。
- 切换 Live Preview Mode(页面顶部的“Live”按钮)。
- 预览窗格将从静态模板切换到实时摄像头画面,实时应用对齐。
验证清单
在 Live Preview 活动时,实际测试对齐:
- 将部件向左、向右、向上、向下移动 — ROI 应该平滑跟随
- 在你指定的范围内旋转部件 — ROI 应该随之旋转
- 尝试范围边缘 — 在 ±max 旋转时会如何?
- 呈现一个不同的(但有效的)部件 — 对齐仍然成立吗?
- 尝试破坏它 — 将部件置于极端位置、部分遮挡特征、在模板区域附近添加碎片
在继续前务必尝试破坏对齐。 如果对齐很脆弱,在生产中将不可预测地失效。花 2–3 分钟积极尝试导致失败。如果经测试仍然通过,就准备投入生产。若不能,请立即修正。不要继续进行 ROI 配置和 AI 训练,否则在对齐问题后续出现时你将不得不重新执行所有内容(瀑布效应)。
提示与技巧
Align to Edges That Never Change
最常见的对齐器错误是在部件之间变化的特征上放置模板区域。即使是微小差异(标签位置略有不同、螺丝角度不同、焊点略有变化)也会降低对齐置信度或引起抖动。
最佳对齐特征:
- 加工边缘、铣削槽、钻孔
- PCB board outlines、安装孔
- 注塑特征,公差紧密(肋、凸台)
- 冲压件轮廓或激光切边
Use Multiple Regions Strategically
两个放置良好的区域总比五个放置不佳的区域更好。理想设置:
- Region 1: 部件的左上角(或顶部)— 清晰的角落或孔
- Region 2: 部件的右下角(或底部)— 不同的显著特征
这种三角定位给对齐器提供位置与旋转数据,且以最大基线距离减少角度误差。
When the Aligner Can't Find the Part
如果对齐持续失败:
- Check the confidence value in Live Preview — is it close to your threshold or near zero?
- If near zero: your template regions have no usable features — redesign them
- If close to threshold: lower the threshold slightly, or clean up noisy edges with the Ignore tool
- If it works on some parts but not others: the varying parts likely have obscured or missing features where your template regions are placed
速度优化
对于毫秒级决定成败的高吞吐量应用:
- 使用 2 个区域(不是 4+)并保持边缘干净
- 设置覆盖实际变化的最窄旋转范围
- 将 灵敏度设为能够产生稳健绿边的最小值
- 若 Z 距离不变,请 禁用 Scale Invariant
- 保持模板区域尽量小——区域越大,需处理的边缘越多
上游变更的恢复
如果你修改以下任意项,必须重新进行对齐器设置:
| 变更项 | 需要重新执行的操作 |
|---|---|
| 镜头畸变矫正 | 重新捕获模板,重做所有区域 |
| 相机镜头或焦距 | 重新捕获模板,重做所有区域 |
| 相机安装位置 | 重新捕获模板,可能需要重新设置区域 |
| 照明配置 | 重新捕获模板,验证边缘仍能被检测到 |
| 图像曝光/增益设置 | 重新捕获模板,验证边缘仍能被检测到 |
何时跳过对齐器
并非所有应用都需要对齐。当以下情况成立时,请禁用对齐器(勾选 "Skip Aligner"):
- 部件放置在能够保证位置在 1–2 像素内的高精度夹具中
- 部件在机械上已对齐且无间隙
- 需要最大处理速度且位置变化可忽略
- 你正在使用一个具有 location-invariant 属性的 segmenter 来处理 3D 零件变异
当跳过对齐器时,ROI 将固定在模板图像上的位置。系统会完全跳过对齐计算,这样更快,但需要部件呈现完全一致。
对齐器设置快速参考
| 设置 | 目的 | 推荐范围 | 何时调整 |
|---|---|---|---|
| 灵敏度 | 边缘检测强度 | 产生绿边所需的最低值 | 区域出现红色高亮时:增大 |
| 旋转范围 | 最大旋转容忍度(±度) | 与实际零件变化相匹配 | 零件以意外角度到达时 |
| 置信度阈值 | 有效对齐的最低匹配质量 | 0.6 – 0.9 | 错误匹配:增大;漏检:减小 |
| 尺度不变性 (Scale Invariant) | 允许 ±10% 尺寸变化 | 仅在 Z 距离变化时启用 | 零件距离相机距离变化时 |
故障排除快速参考
| 问题 | 可能原因 | 解决办法 |
|---|---|---|
| ROI 完全不移动 | 已启用 Skip Aligner,或不存在模板区域 | 禁用 Skip Aligner;添加模板区域 |
| 置信度始终接近 0% | 模板区域没有可用边缘 | 将区域移动到边缘清晰的位置 |
| 对齐抖动/摆动 | 单一区域或区域彼此太靠近 | 在部件两侧较远的位置添加区域 |
| 匹配到错误对象 | 模式不够唯一,阈值过低 | 添加更多具有辨识特征的区域;提高阈值 |
| 某些零件有效,其他零件无效 | 模板区域位于可变特征上 | 将区域移动到所有零件都存在的特征上 |
| 对齐速度慢 | 区域过多、旋转范围过宽、尺度不变性开启 | 减少至 2 个区域,缩窄旋转范围,如无需要则禁用尺度不变性 |
相关文档: